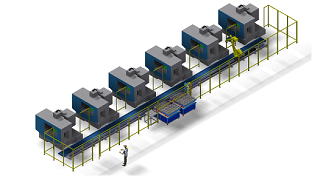
1. FANUC robot is responsible for gear loading and unloading of nc lathe
2. Circulating bin feeding system
3. Double-station hand grasping the finished products and the products to be processed
4. The robot puts the processed products into the feeding line and deburring the products through the deburring machine. After completion, the products are transported to the turntable and waited for the personnel to pick up the materials.
This project is a robot lathe processing automation system, which USES industrial robot to cooperate with two-station hand grip to replace the lathe operator, and selects the material from the circulating bin to carry out automatic jacking and positioning of the inserts at the same time to improve the operating efficiency of the equipment.
1. FANUC M10 robot is adopted to cooperate with dual-station hand claws. One hand grip is responsible for clamping the product, and the other hand grip is responsible for clamping the blank. The feeding cycle is short, efficient and stable.
2. There is a large amount of circulating materials in storage, and feeding does not affect other actions of the machine platform.
3. Servo jacking mechanism, good positioning stability!
 |
 |
 |
 |
| Car parts | Metal processing | IT Electronics | Forging casting |
 |
 |
 |
 |
| Rubber plastic | Composite material | New energy | Wood furniture |
 |
 |
 |
|
| Plastic industry | Toy industry | Other rubber coating industry |